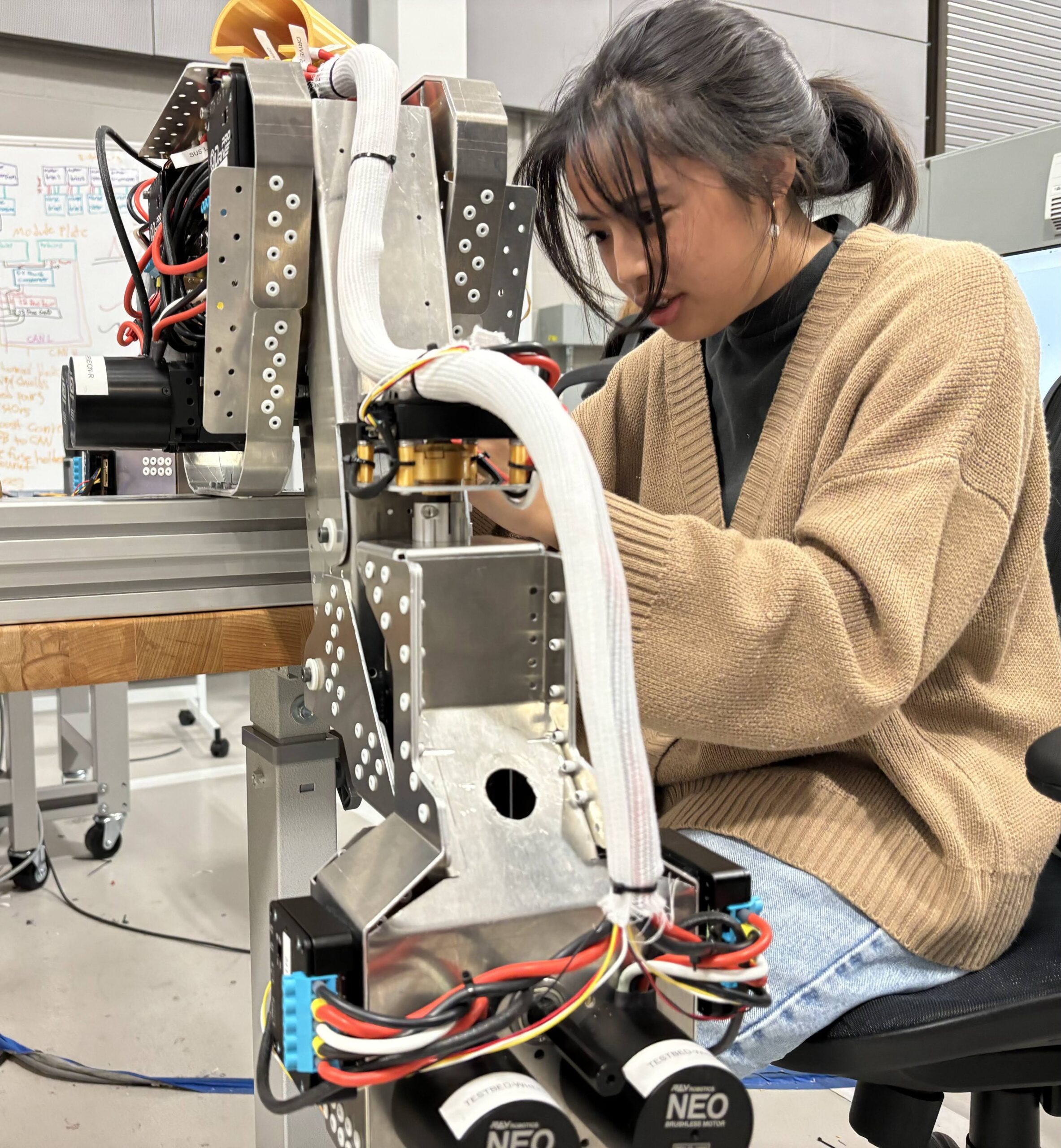
Facing the challenge of creating a mobility platform that is both robust and high-performing, RAD Lab has developed the RAD Exploration Vehicle (REV). With each leg module having 3 degrees of freedom: steer, drive, and suspension, this 6-wheeled style of rover opens opportunities for unique control modes to traverse previously unreachable area of planetary surfaces, such as stepping and crawling modes for traversing rocky terrains and soft soil.
One particularly interesting control mode leverages the active suspension of the rover. For this project, NASA has developed custom torsional springs to be integrated as a force of passive suspension in the rover. More importantly, by measuring small deflections in the spring, the force on each leg can be determined. Eventually, force sensing can be used to allow the rover to distribute load on its leg or offload load on a leg reaching its torque limits. In addition, force sensing can be used to measure ground properties (i.e., sinkage) for terrain detection.
REV represents exciting new developments in the mobile robot field.
RAD Exploration Vehicle Gallery