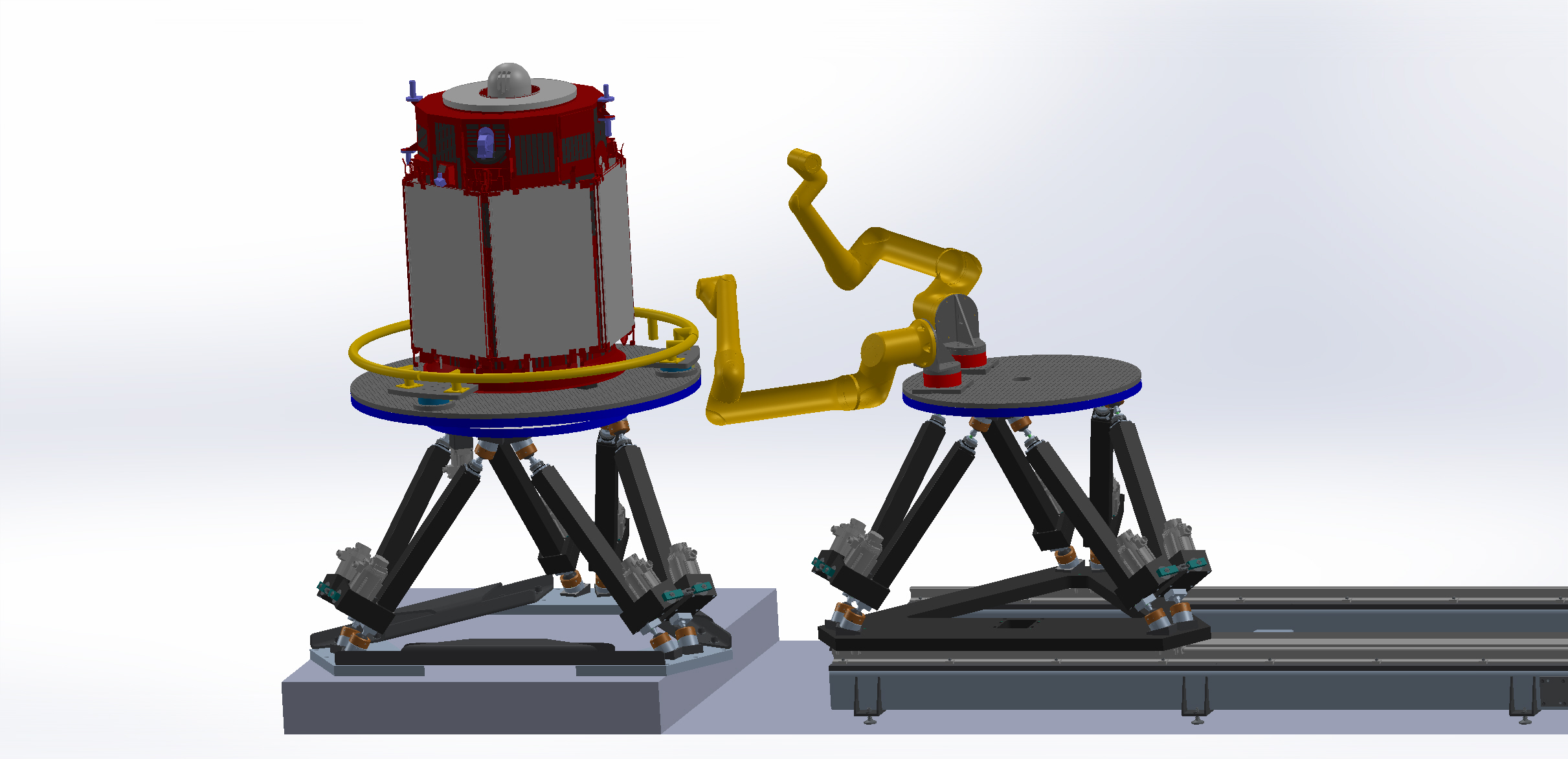
Building on foundational work by NASA in simulated docking systems and orbital robotic manipulation, we introduce the Robotic Space Simulator (RSS), which uses two 7-DOF Gough-Stewart platforms to fuse accurately simulated centroidal dynamics with real force-sensorized contact interaction and realistic visuals. The RSS was developed to simulate a spacecraft with robotic manipulators approaching, grappling, manipulating, and decoupling from another spacecraft.
The primary structure of the RSS consists of two 6-DoF Stewart Platforms, each of which is customized with an additional 7th DoF. The first platform (“slide”) rides on a 6 meter track, providing a significant increase in its workspace along one translational axis. The RSS system is oriented such that this additional DoF is along the approach axis to the second platform to simulate the final approach to the objective spacecraft. The second platform (“rotary”) adds two full rotations in the yaw axis, allowing increased range for manipulation tasks.
Each platform is equipped with force and torque sensing capability. On the rotary platform, three sensors are rigidly coupled to support a spacecraft body and measure the externally applied forces and torques on this body. On the slide platform, each manipulator is supported by its own individual sensor. This enables accurate measurement of forces and torques imparted on the host spacecraft from both the contact of the manipulator and the manipulator dynamics.
Robotic Space Simulator Gallery