RAD Lab is developing actuators for a variety of in-house and contracted projects, as well as to support research in dynamics, controls, and series-elastic-actuator (SEA) spring topics. The actuator’s capstone program is the Space Modular Manipulator (SMM), for which a variety of space-rated actuator and joint sizes will be developed to modularly recombine to satisfy a variety of mission profiles. Each actuator is equipped with a planar SEA spring for high-fidelity torque sensing, which will give the SMM and other manipulators designed using these actuators fine-forcing and human-interacting capability. Further, Roboball II uses 4 actuators designed as a part of this program for control.
The RAD Lab is equipped with a modular dynamometer to fingerprint actuators ranging from 20-1,500 Nm torque capability, and evaluate the performance of torque springs. This dynamometer is being designed by FluxWorks, a local company founded by a Texas A&M Ph.D. graduate.
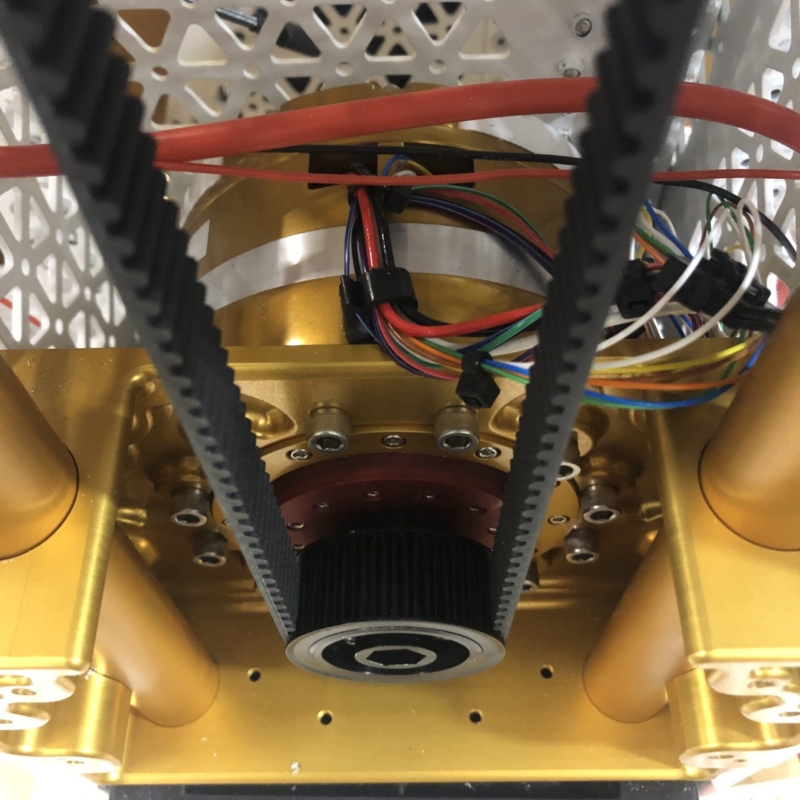
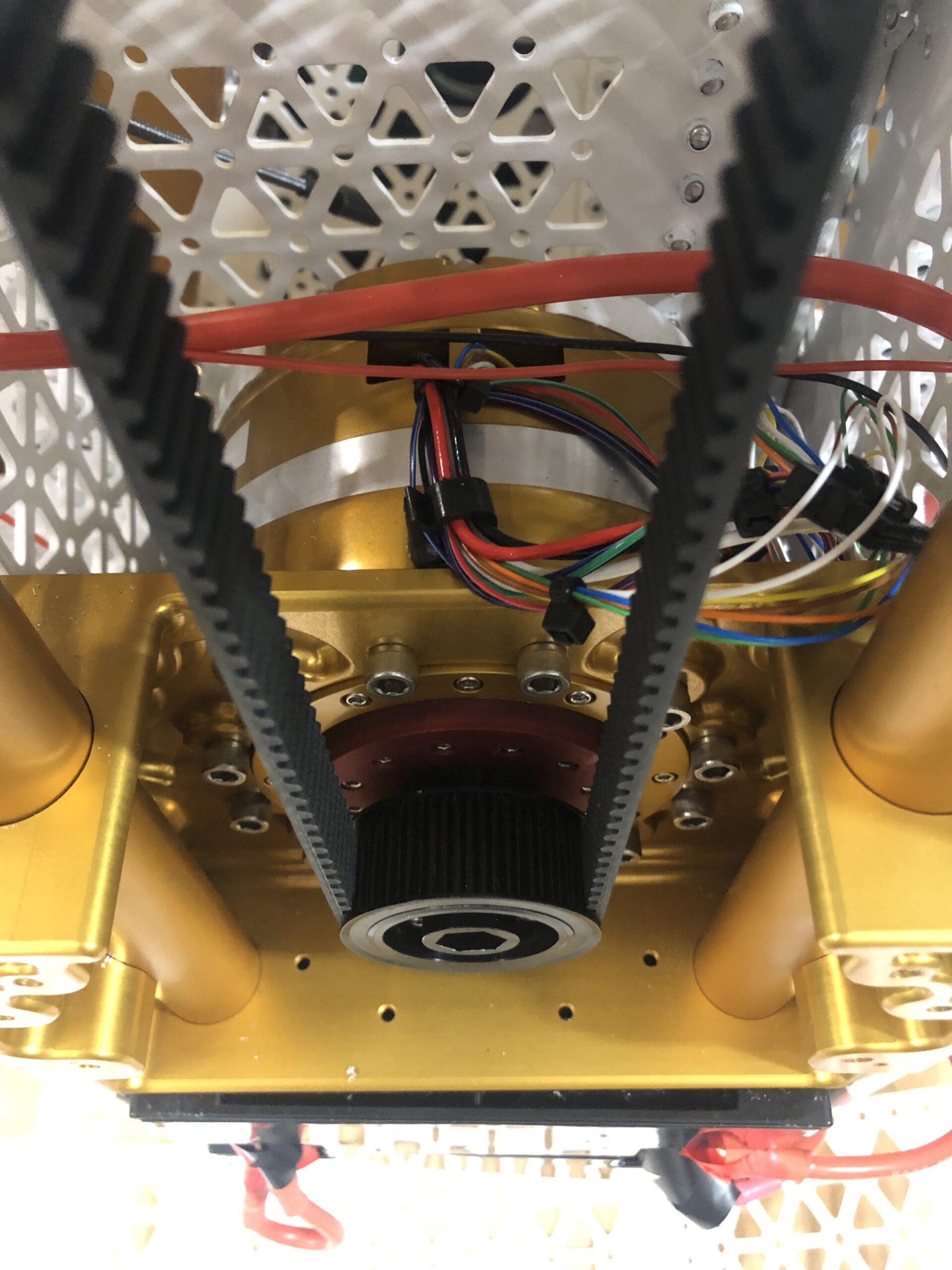
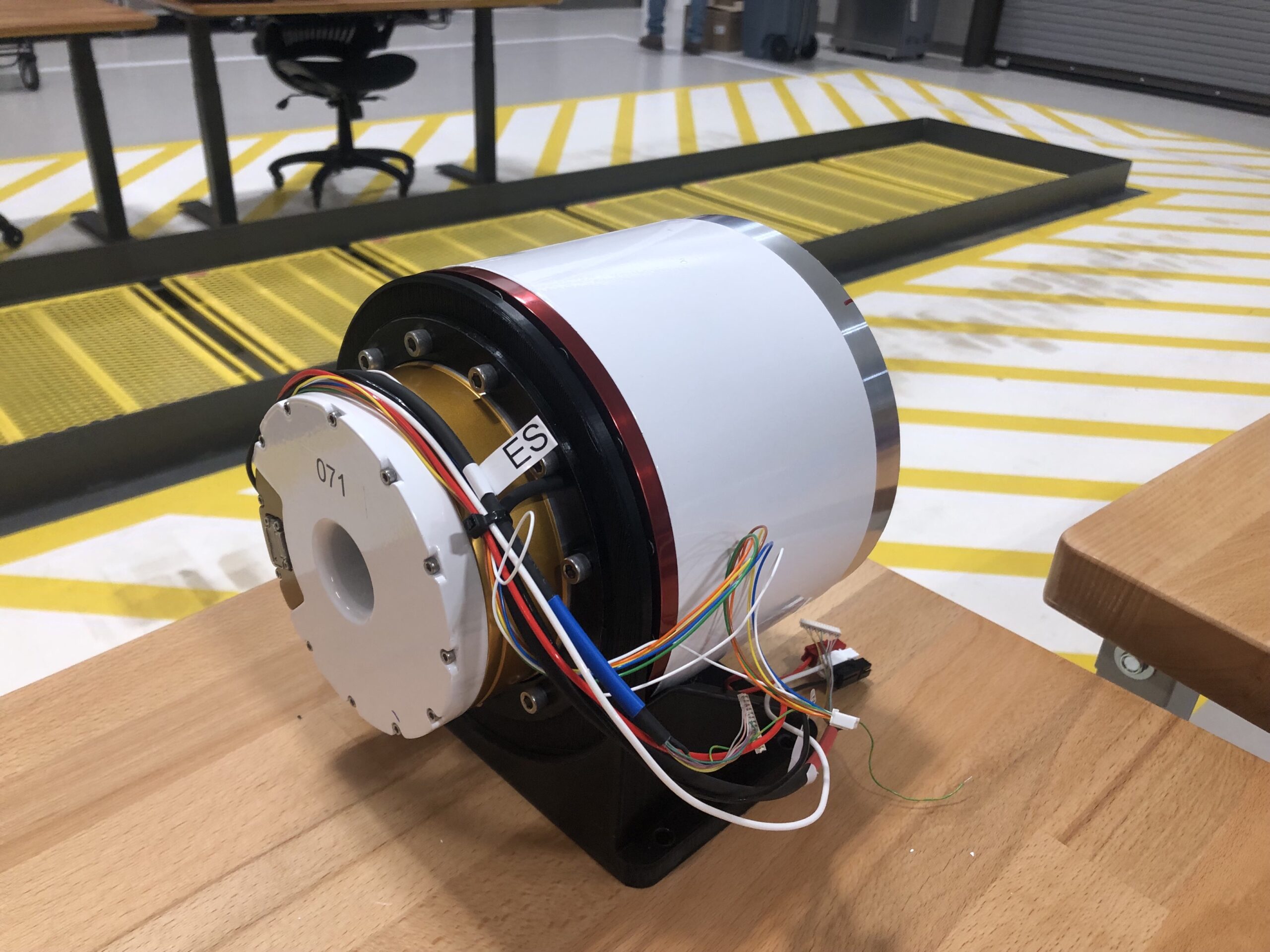
Actuator Gallery